antis es la obra que desarrollé para la muestra de arte, ciencia y tecnología FASE 5.0 - Metáforas de la supervivencia, que se llevó a cabo durante el mes de noviembre de 2013 en el Centro Cultural Recoleta de Buenos Aires. Para ese entonces, la obra ponía a disposición del espectador (niños/as) unicamente dos pulsadores para controlar la dirección de avance del robot, cada uno de los cuales tenía una programación que establecía un tiempo de encendido de 10segundos que podía ser interrumpido al pulsar la dirección opuesta.

Ahora con motivo de la muestra prevista para marzo de 2015 en el Espacio Cultural Julio Le Parc de la ciudad de Mendoza, decidí hacer una nueva versión con más opciones de control agrupadas en distintos comandos de modo que más niños puedan participar de la acción en simultáneo controlando diversos comandos de la obra y descubrir en la práctica y el diálogo para qué sirve cada control y cuál es la misión del robot dentro de la obra.
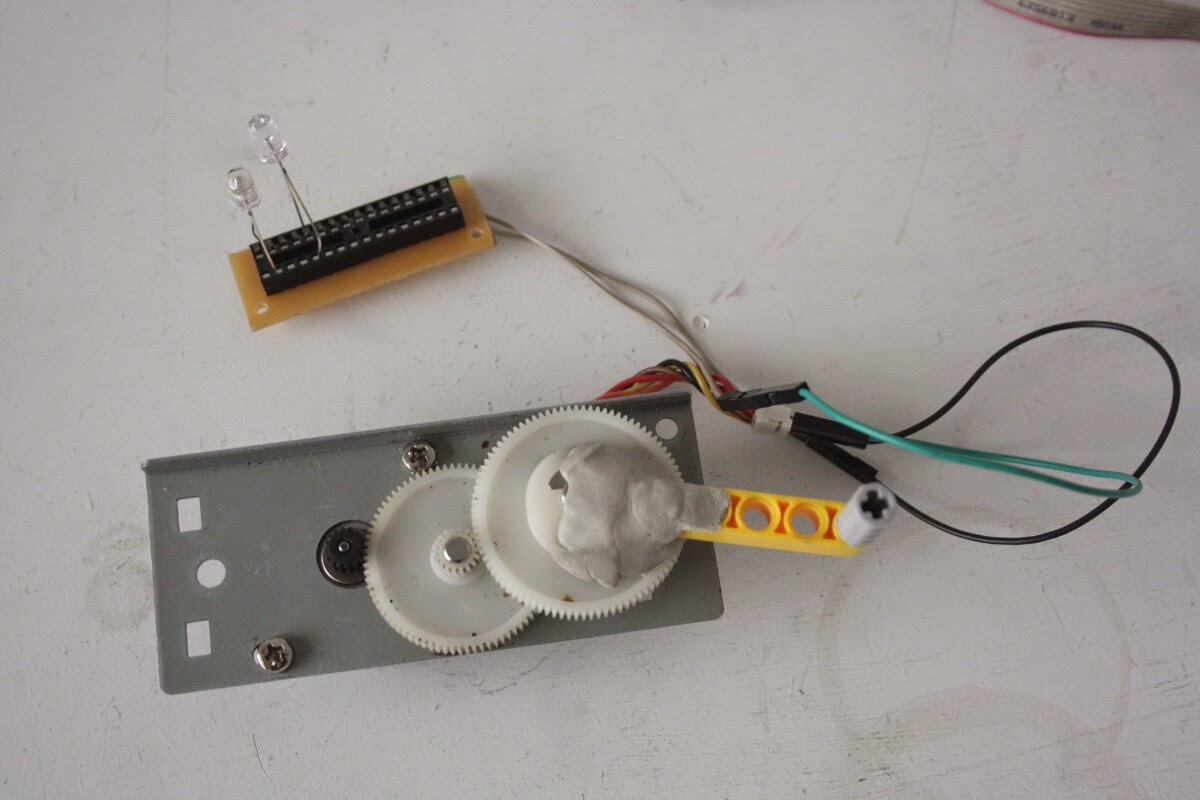
Así pues como un primer avance en este desarrollo armé este circuito de dos pwm y con puente H para controlar la dirección y velocidad de dos motores... en principio antis está fabricado en LEGO Technic, con un único motor de doble eje, pero para la segunda versión "antis 2" quiero modificar algunas cosas también en la mecánica del robot de modo que incorpore otro motor posiblemente para regular los dos pares de patas de forma independiente y complicar un poco su manejo, para que los niños deban colaborar más entre ellos para ponerlo en correcto funcionamiento.

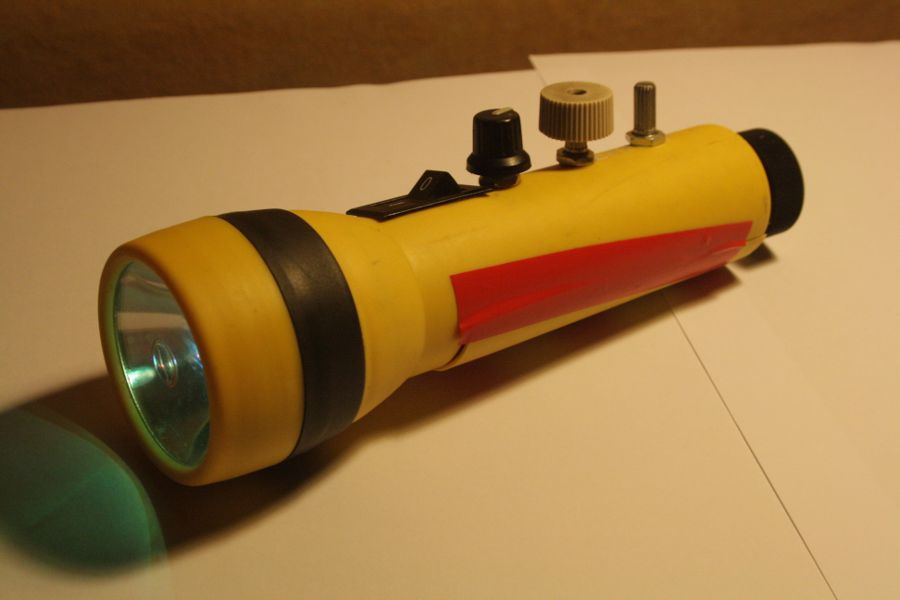
Otras cosas que quiero incorporar en antis 2 son luces (con dimmer y secuencias) en el robot y una serie de sensores LDR en su entorno para realizar modificaciones de sonido... para establecer un poco más claramente una meta a cumplir que podría ser: hacer que se ejecute una determinada secuencia sonora ó interferir la transmisión de una radio; tal como permitía realizar el auto fantástico desarrollado para el proyecto acciones mínimas {irgendetwas} del 2° proyecto cuatrimestral de la Maestría. Como también ampliar el entorno de desplazamiento y realizarle algunas modificaciones estéticas.
linterVaso, proyecto 2 (2012): linterna intervenida con 1 led RGB y 4 reguladores de intensidad (dimmers), 3 para los colores y 1 para la mezcla general.

auto fantástico: auto a control remoto por cable intervenido y fusionado con una radio portátil, el parlante y la antena de la radio montados en el auto y los comandos de ambas cosas en el control remoto. Un botón permite activar una función de interferencia por circuit bending, en la emisión sonora de la radio que a su vez varía al modificar el volúmen, la frecuencia y tipo de emisión radial (AM/FM).
Para esta oportunidad la obra cambiará de nombre también porque he modificado mucho el concepto de la misma... pero por ahora está bien que siga llamándose "antis 2".
Constaría de 6 controladores independientes con 2 o 3 botones o perillas cada uno:
1. control de dirección motor A
2. control de dirección motor B
3. control de velocidad de los motores
4. control de encendido y regulación de intensidad de las luces
5. control de secuenciadores de las luces
6. control de sonido de la radio: volumen, frecuencia y sintonía
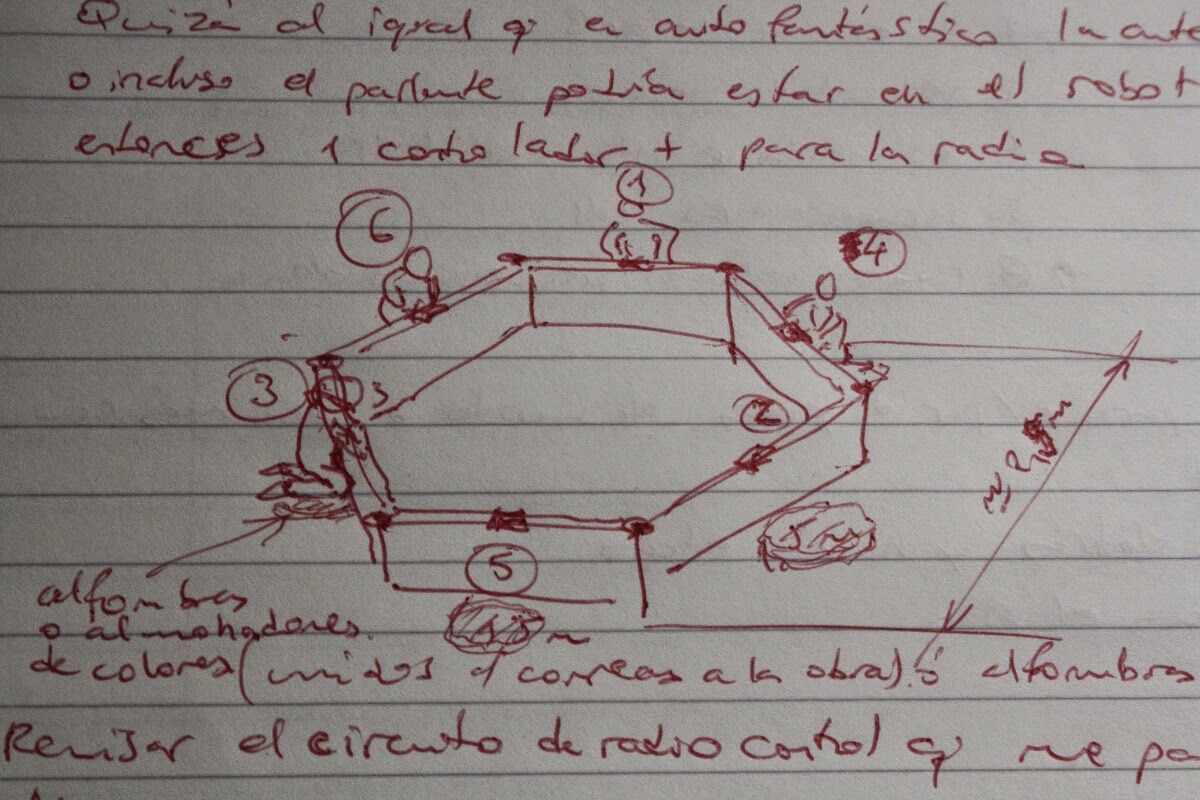



Encastre de cada uno de los bastidores que arman el hexágono.